The extruder how can I make one cheaply:
Search the RepRap Wiki to find a set of drawings for the extruder parts.
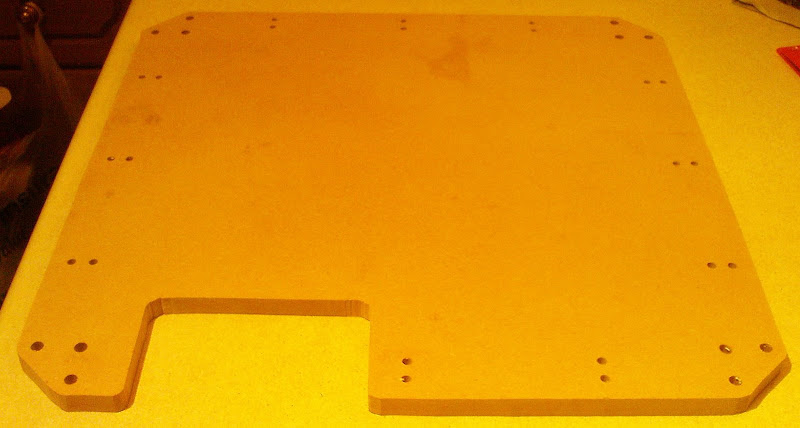
The answer had to be using hard wood plywood from the local
Bodge It Quick store:
For the 10mm thick parts use 9mm hard wood ply.
To get the 15mm thick parts glue 6mm to 9mm hard wood ply.
To get the 25mm thick parts make it 24mm with 18mm glued to 6mm hard wood ply.
As these parts were designed to be printed or lazer cut not made from wood.
Planning the way you start to fabricate them is required.
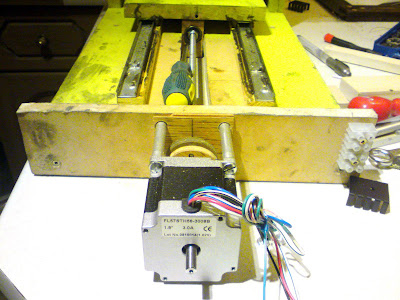
The extruder design I am opting for the direct drive extruder system.
As I alredy have the optical encoder from Zack at the rrrf built and working.
The direct drive extruder has still two designs one of Adrians and on from Nophead.
The difrence being Adrians retains the drive gearing and Nopheads has this removed.
I alredy have bought the two packs of 5 Geenbank gear wheels seems a pity to waste them.
But Nopheads extruder is simpler for not having them going for the Kiss system (Keep It Simple Stupid) I can always add the gearing later if its needed saves at least making the L shaped part that holds the gears.
So I can scrubb the L shaped 25mm /24mm thick part.
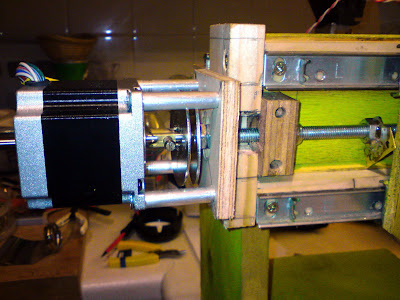
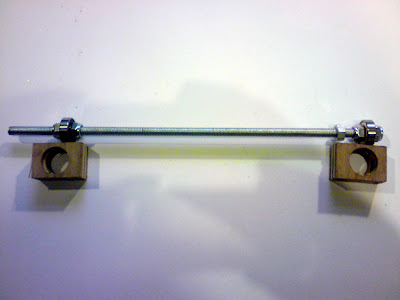
Parts list is now reduced to the screw side of the extruder and the polymer guide part of the extruder. The Motor mounting bracket, the extruder assembly mounting bracket, the motor coupling.
Router in clasped firmly in my hand its off to the shed....